ABOUT
MARS SOLAR PANEL CLEANING ROVER
The Mars Solar Panel Cleaning Rover project encompasses the design, development and testing of a rover that can clean solar panels on Mars autonomously. This project is important to missions on Mars because the accumulation of dust on solar panels negatively affects the output of solar panels, a main source of energy for exploration missions on the planet. The goal of this project is to build a mobile robotic platform that is equipped with sensor modules, actuators, and a specialised cleaning unit. It will be able to navigate autonomously, detect obstacles, and perform effective panel maintenance.
The rover’s design would consist of a structurally sound custom-made chassis and its assembly, implementation of the drive system and sensors and programming them to navigate through obstacles with a preset start and end point with a manual override as a failsafe, installation of a simple but effective cleaning apparatus to minimise points of failure, testing all the functions of the rover in different scenarios that commonly occur on Mars and improving on problems that come up during the process.
TEAM

Leon Enrile
Lead, Troubleshooter & Coder
Leon led the project, handling coding, wiring, and troubleshooting.
His all-round technical skills ensured the project ran smoothly.

Oleg Milgizin
Designer
Oleg contributed creative design ideas for the project layout and structure.
His designs provided a solid foundation for the team’s work.

Rasesh
Software & Webpage Developer
Rasesh focused on the software and webpage aspects of the project.
His coding work made the project interactive and user-friendly.

Iniyan
Designer
Iniyan assisted in the design and planning of the project components.
His attention to detail helped make the project visually and functionally cohesive.
INTRODUCTION
Mars exploration missions need solar panels to make power. However, fine dust particles from Mars land on the panels and prevent the sun from getting through to the solar panel. This means the panels do not make as much power as they should, showcasing a huge problem for most rovers that depend on solar power as their primary energy source.
These particles are electrostatically charged, which makes them stick to the solar panels. And because Mars has much lower gravity compared to Earth and a very thin atmosphere, the current methods of solar panel cleaning including gusts of wind or dust devils to pick up the dust are not reliable in the long-term due to the strongest Martian winds not being able to exceed 30m/s — but due to the much lower atmospheric pressure, it will feel like around 4m/s.
To solve this problem, the Mars Solar Panel Cleaning Rover will be autonomous, capable of executing its task of cleaning solar panels effectively with minimal human intervention, minimal power consumption and without damaging the surface of the solar panel itself.
PROBLEM STATEMENT
Solar panels that are used in Mars missions constantly get covered in dust particles. This dust is detrimental for the panels’ output because it prevents them from getting sunlight to make power, this causes the solar panels to not generate as much power as they could. The problem is that there is no one on Mars to clean the panels, and the methods that are used to clean them without human intervention are ineffective. Dust accumulates over time, causing a gradual decrease in power generated.
Mars missions that are already happening do not have rovers that clean them because of the large mass of the rover and their large power consumption, making them not as effective as required for reliable long-term operation. Additionally, they exhibit limited durability over extended mission durations. Missions on Mars need a rover that can clean the panels by itself without using a lot of power and weighing too much. This rover also needs to be able to clean the panels without damaging them.
OBJECTIVES
The objective of this project is to design a rover that will be capable of autonomously cleaning the dust accumulation present on solar panels deployed on Mars with little energy wasted cleaning it and with consistent, reliable output. (95% of solar panel maximum output)
Specific Objectives:
- Develop an autonomous cleaning rover requiring minimal human intervention.
- Enable safe navigation across solar panel surfaces.
- Design a non-abrasive and efficient dust removal mechanism.
- Integrate sensors for obstacle detection, edge detection, and dust assessment.
- Optimize energy consumption for long-duration operations.
- Evaluate system performance under simulated Mars-like conditions.
EXISTING SYSTEMS
Existing Cleaning Techniques:
- Natural wind and dust devils: Unpredictable and unreliable - wind on Mars is not strong enough to effectively remove dust blocking the solar panels and deliver reliable output.
- Protective coatings: Limited effectiveness against fine dust
- Electrodynamic cleaning concepts: Experimental and not yet deployed.
- Chladni patterns using sound: Not mobile or modular, unnecessary power consumption and not yet deployed.
Limitations of Existing Systems:
- No human presence on Mars for maintenance.
- Continuous dust accumulation.
- Harsh environmental conditions.
- Energy and weight constraints.
- Mechanical wear caused by abrasive dust.
SYSTEM OVERVIEW
The Mars Solar Panel Cleaning Rover is a command-based system capable of moving across the surface of solar panels.The rover consists of integrated mechanical, electrical, and software components that work together to ensure reliable performance. This coordinated system enables accurate movement, effective dust removal, and stable operation.
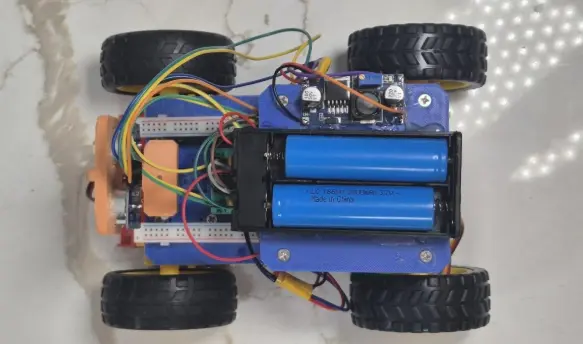
COMPONENTS USED
- Microcontroller: ESP8266 NodeMCU v3
- Power System: 2x Rechargeable 3.7V lithium battery.
- Actuators: 4x DC motors and 2x servo motors
- Motor Driver: L293
- Sensors: Ultrasonic sensor
- Cleaning Mechanism: Rotating soft brush and plow blade
- Mechanical Structure: 3D-printed chassis
- Mobility System: Wheels
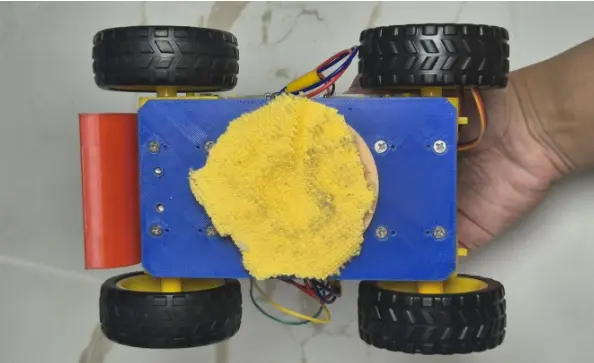
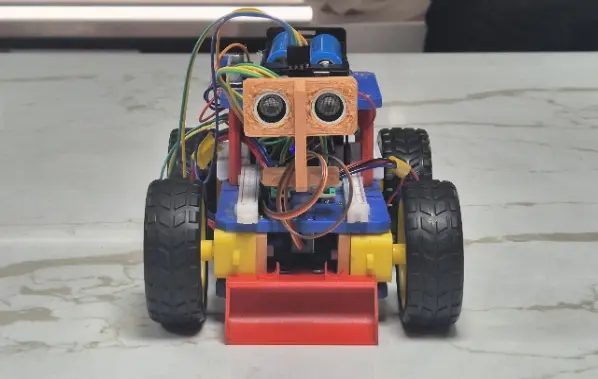
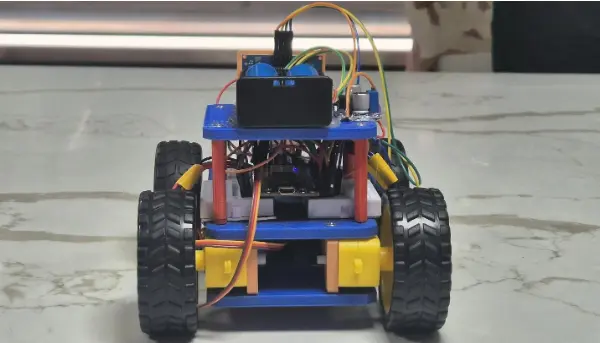
MECHANICAL DESIGN
The rover has a lightweight body that is made to work on flat solar panels. It has a plow blade in the front that gets rid of small rocks when it runs into them. The rover also has a microfiber cloth that spins around underneath and next to it to get rid of dust particles present on the solar panels.
The four-wheel configuration provides the rover with high stability, allowing it to move smoothly across each solar panel during cleaning operations. The mechanical design emphasizes durability and long-term reliability, ensuring all components can operate for extended periods without maintenance.

SOFTWARE AND PROGRAMMING
The rover is controlled using an ESP8266-Based NodeMCU microcontroller that is programmed to navigate the solar panels via commands. This is the flowchart for the cleaning process we planned to program.

ADVANTAGES & LIMITATIONS
Advantages:
- Operation with minimal human intervention
- Low energy consumption
- Lightweight and compact design
- Cost-effective and modular
Limitations:
- Exposure to harsh Martian conditions
- Limited load-carrying capacity
- Traction challenges on dusty surfaces
- Limited onboard processing power
- Long-term mechanical wear
- Not completely autonomous
POTENTIAL IMPROVEMENTS
- Use advanced materials such as carbon fiber or aluminum alloys to improve chassis longevity.
- Improve wheel traction and mobility systems.
- Integrate advanced sensors for better obstacle detection.
- Implement machine learning-based dust detection and navigation for better autonomous operation.
- Enhance thermal protection to withstand extreme temperatures.
- Power the rover with a solar panel to ensure long-term operation.
CONCLUSION
The Mars Solar Panel Cleaning Rover provides an effective solution to one of the major challenges on Mars: dust accumulation on solar panels. The rover operates with a small energy consumption, ensuring reliable power availability and improving overall mission safety. However, it does not truly operate autonomously as it requires a website to control its movement and necessitates an overhaul in the materials used in the chassis to withstand the Martian environment. With further development and testing, the Mars Solar Panel Cleaning Rover has strong potential to play a valuable role in future Mars missions.
REFERENCES
https://science.nasa.gov/photojournal/dusty-solar-panels-on-spirit/
https://science.nasa.gov/photojournal/solar-panel-dust-accumulation-and-cleanings/
https://ntrs.nasa.gov/citations/20120003264
https://www.nasa.gov/solar-system/the-fact-and-fiction-of-martian-dust-storms/
https://www.nature.com/articles/s41598-025-86363-7
https://www.the-diy-life.com/arduino-based-obstacle-avoiding-robot-car/
https://www.thingiverse.com/thing:1775897